W elektronice i automatyce najbardziej cenione są rozwiązania, które dają się przewidzieć i łatwo nastroić. Właśnie dlatego tak często stosuje się regulator PID: prosty w założeniu, a bardzo skuteczny w utrzymywaniu temperatury, prędkości, napięcia czy przepływu na zadanym poziomie. Poniżej pokazuję, jak działa taka pętla, gdzie naprawdę ma sens, jak ją stroić i kiedy lepiej wybrać prostsze sterowanie.
Najkrótsza droga do zrozumienia sterowania PID
- PID porównuje wartość zadaną z pomiarem i na tej podstawie koryguje sterowanie w pętli zamkniętej.
- Człon P reaguje od razu, I usuwa błąd ustalony, a D tłumi zbyt gwałtowne zmiany.
- W elektronice i układach energetycznych bardzo często wystarcza PI, a pełny PID przydaje się tam, gdzie liczy się też szybkie tłumienie przeregulowania.
- Źle nastrojony układ najczęściej kończy się oscylacjami, szumem na wyjściu albo zjawiskiem windup, czyli „nakręcaniem” całki przy ograniczeniu aktuatora.
- W falownikach, przetwornicach, ładowarkach i układach termicznych kluczowe są: jakość pomiaru, czas próbkowania i ograniczenia mocy wykonawczej.
Jak działa pętla sterowania w praktyce
Ja zwykle tłumaczę to tak: sterownik patrzy na różnicę między wartością zadaną a tym, co rzeczywiście mierzy czujnik, a potem dobiera korektę. W najprostszym zapisie sygnał sterujący jest sumą trzech reakcji: proporcjonalnej, całkującej i różniczkującej. Dzięki temu układ nie działa „na ślepo”, tylko cały czas sprawdza, czy zbliża się do celu, czy się od niego oddala.
To właśnie odróżnia pętlę zamkniętą od prostego włącz/wyłącz. W elektronice ma to ogromne znaczenie, bo wiele procesów nie lubi gwałtownych skoków: zasilacz, falownik, napęd silnika czy układ grzania reagują lepiej, gdy korekta jest płynna, a nie agresywna. PID nie jest więc magicznym wzorem, tylko sposobem na rozsądne zarządzanie błędem w czasie.
Człon proporcjonalny daje natychmiastową reakcję
Składowa P odpowiada za to, jak mocno sterownik reaguje na aktualny błąd. Im większe odchylenie od celu, tym silniejsza korekta. To najprostsza i najbardziej intuicyjna część układu, ale sama w sobie zwykle nie wystarcza, bo pozostawia błąd ustalony albo powoduje zbyt miękką odpowiedź.
Człon całkujący usuwa błąd, który zostaje po czasie
Składowa I sumuje błąd w czasie. Jeśli układ przez dłuższą chwilę nie trafia w wartość zadaną, całka „dokłada” coraz większą korektę, aż pomiar dojdzie do celu. To właśnie ten człon zwykle domyka precyzję, ale też najłatwiej go przesterować. Gdy aktuator dojdzie do ograniczenia, całka może dalej narastać i później wywołać niepotrzebne przeregulowanie.
Przeczytaj również: Czy fotowoltaika to termomodernizacja? Jak panele słoneczne zmieniają budynki
Człon różniczkujący hamuje zbyt szybkie zmiany
Składowa D patrzy na to, jak szybko zmienia się błąd. Jeśli pomiar zaczyna gwałtownie uciekać, sterownik wcześniej „przyhamowuje” korektę. W praktyce daje to lepsze tłumienie i mniejsze oscylacje. Jest jednak jeden haczyk: różniczkowanie wzmacnia szum, więc w elektronice ten człon trzeba stosować ostrożnie, zwykle z filtrem.
Gdy rozumie się te trzy reakcje osobno, łatwiej ocenić, gdzie układ będzie działał stabilnie, a gdzie tylko będzie wyglądał dobrze na papierze. Z tego od razu wynika kolejne pytanie: w jakich urządzeniach taka pętla naprawdę się przydaje?
Gdzie taki układ sprawdza się najlepiej w elektronice
W praktyce najczęściej spotykam go tam, gdzie trzeba utrzymać jakiś parametr mimo zmiennych warunków pracy. W systemach elektronicznych i energetycznych nie chodzi tylko o „ładne wykresy”, ale o stabilność napięcia, temperatury, prądu albo prędkości. To właśnie dlatego algorytmy PID i ich uproszczone warianty trafiają do mikrokontrolerów, sterowników mocy i układów automatyki.
- Falowniki i przetwornice w instalacjach PV - pętla pomaga utrzymać napięcie i prąd w bezpiecznym zakresie mimo zmian nasłonecznienia, obciążenia i temperatury. W praktyce bardzo często pracuje tu zestaw pętli kaskadowych: szybsza dla prądu i wolniejsza dla napięcia.
- Zasilacze impulsowe i ładowarki - sterownik koryguje wyjście mimo wahań wejścia i skoków poboru. Tu liczy się szybka odpowiedź, ale też odporność na ograniczenia mocy i zakłócenia przełączania.
- Regulacja temperatury - grzałki, wentylatory, chłodzenie obudów i magazynów energii korzystają z tego, że sterowanie nie „przepala” układu, tylko utrzymuje temperaturę w wąskim zakresie.
- Napędy i silniki - w sterowaniu prędkością i pozycją PID pomaga zminimalizować zwłokę i przeregulowanie, szczególnie gdy obciążenie zmienia się w czasie.
W instalacjach fotowoltaicznych ważna jest jeszcze jedna rzecz: PID nie służy do paneli samych w sobie, tylko do elektroniki, która zarządza przepływem energii wokół nich. To sprawia, że w praktyce ten sam mechanizm bywa używany do kontroli pracy falownika, ładowania akumulatora i odprowadzania ciepła. A skoro zastosowań jest kilka, warto umieć odróżnić, kiedy pełny PID ma sens, a kiedy wystarczy prostszy wariant.
Jak dobrać między P, PI i pełnym PID
Najczęściej wybór nie brzmi „czy wziąć PID”, tylko „czy naprawdę potrzebuję wszystkich trzech członów”. W elektronice mocy i automatyce bardzo często kończy się na PI, bo człon różniczkujący daje mniej korzyści, niż się spodziewa, a za to potrafi mocno podnieść wrażliwość na szum. Poniższe zestawienie pomaga spojrzeć na to praktycznie.
| Wariant | Co daje | Kiedy ma sens | Ryzyko |
|---|---|---|---|
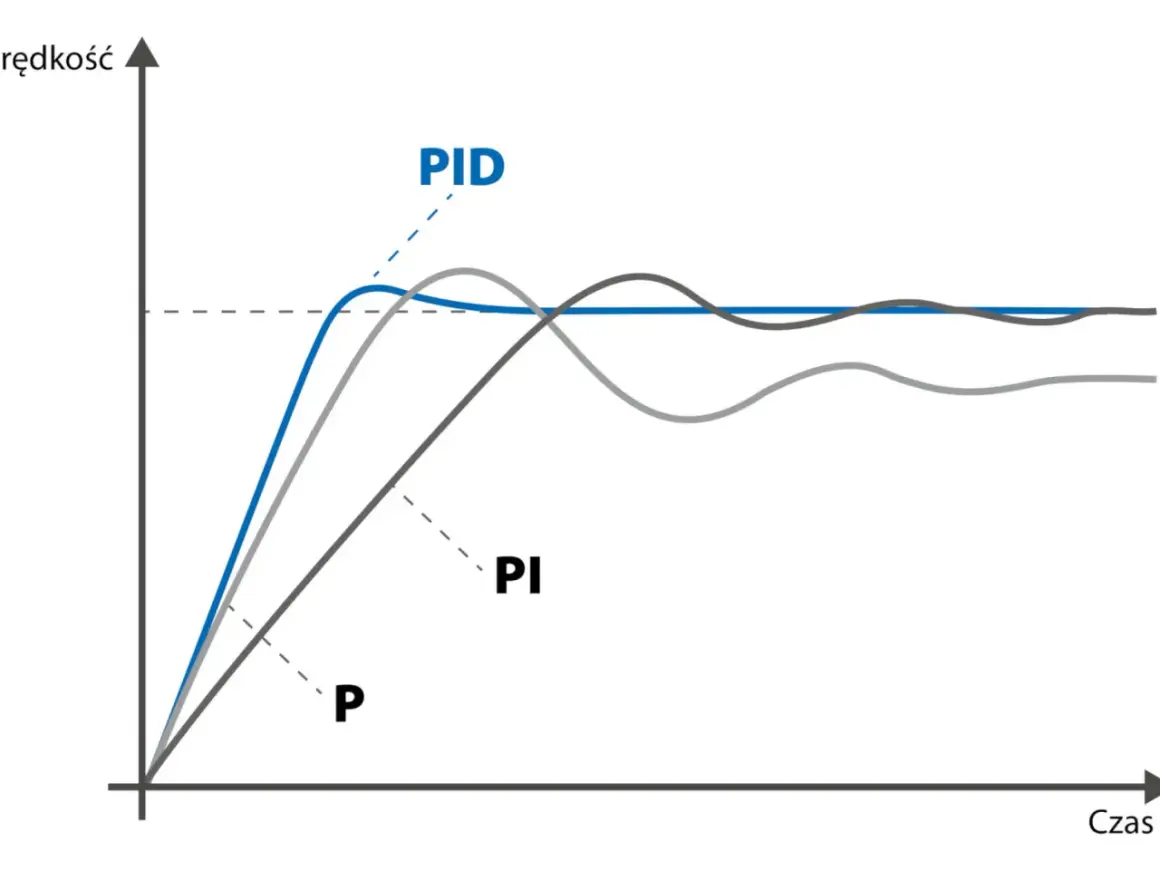
| P | Szybką reakcję na aktualny błąd | Proste układy, w których niewielki błąd ustalony jest akceptowalny | Może zostawić odchyłkę i łatwo wywołać oscylacje przy zbyt dużym wzmocnieniu |
| PI | Reakcję bieżącą i usuwanie błędu ustalonego | Zasilacze, przetwornice, regulacja temperatury, wiele pętli w energetyce | Całka może się „nakręcać”, jeśli wyjście osiąga ograniczenie |
| PID | Precyzję, szybsze tłumienie i lepszą odpowiedź dynamiczną | Układy, w których trzeba jednocześnie szybko reagować i dobrze wygaszać przeregulowanie | Większa wrażliwość na szum i większa złożoność strojenia |
Ja w takich układach patrzę przede wszystkim na charakter obiektu. Jeśli proces jest powolny, ma spory szum pomiarowy albo działa z dużym opóźnieniem, pełny PID nie zawsze będzie najlepszym wyborem. Jeżeli jednak układ ma być szybki, a jednocześnie nie może „dzwonić” po każdej zmianie obciążenia, dodatkowy człon D potrafi realnie pomóc. To prowadzi już prosto do strojenia, bo nawet dobry wybór algorytmu nie uratuje źle ustawionych parametrów.
Jak stroić go bez zgadywania
W strojenie warto wejść metodycznie, a nie „na wyczucie” po kilku przypadkowych zmianach. Najbezpieczniej zacząć od prostego układu P, potem dodać I, a dopiero na końcu sięgnąć po D, jeśli odpowiedź nadal jest zbyt ospała albo przeregulowanie za duże. W sterowaniu cyfrowym trzeba przy tym pilnować czasu próbkowania, bo zbyt rzadkie odczyty potrafią zepsuć nawet sensowny dobór parametrów.
- Wyłącz całkę i różniczkowanie, ustaw małe wzmocnienie P i sprawdź, jak układ reaguje na skok wartości zadanej.
- Zwiększ P do momentu, w którym odpowiedź staje się szybka, ale jeszcze nie wpada w wyraźne oscylacje.
- Dodaj I, żeby usunąć błąd ustalony, i obserwuj, czy układ nie zaczyna „przelewać” korekty po dojściu do celu.
- Jeśli potrzeba lepszego tłumienia, dołóż D, ale zastosuj filtr, bo idealne różniczkowanie wzmacnia szum z czujnika.
- Testuj osobno zmianę wartości zadanej i osobno zakłócenia na wyjściu, bo to dwa różne scenariusze pracy.
W praktyce bardzo pomaga też zapis odpowiedzi skokowej. Dzięki temu widać, czy układ jest po prostu wolny, czy ma problem z przeregulowaniem, czy może gubi się na zakłóceniach. Taka diagnostyka jest znacznie lepsza niż dokładanie kolejnych wzmocnień „na oko”.
Najczęstsze błędy i ograniczenia, o których łatwo zapomnieć
PID ma opinię uniwersalnego rozwiązania, ale uniwersalny nie znaczy bezproblemowy. W praktyce to właśnie ograniczenia czujników, aktuatorów i dynamiki obiektu najczęściej decydują o tym, czy układ będzie stabilny. Jeśli te ograniczenia zignorujesz, nawet dobrze wyglądające nastawy będą działały tylko częściowo.
- Windup całki - gdy wyjście sterujące osiągnie limit, całka może dalej narastać. Rozwiązaniem jest anti-windup, czyli mechanizm blokujący lub korygujący integrację przy nasyceniu.
- Zbyt agresywny człon D - poprawia tłumienie, ale łatwo wzmacnia szum pomiarowy i ripple z elektroniki mocy.
- Ignorowanie opóźnienia obiektu - jeśli proces reaguje z dużą zwłoką, zbyt mocne P i I prawie zawsze kończą się oscylacją.
- Jeden zestaw nastaw dla wszystkich warunków - układ może zachowywać się inaczej przy małym obciążeniu, inaczej przy dużym, a jeszcze inaczej przy zmianie temperatury.
- Brak filtracji pomiaru - bez czystego sygnału wejściowego trudno oczekiwać stabilnej regulacji, zwłaszcza w układach przełączających.
Jedna rzecz jest tu szczególnie ważna: człon D często lepiej liczyć od pomiaru niż od samej wartości zadanej, bo wtedy ogranicza się nieprzyjemny skok sterowania przy zmianie setpointu. To drobiazg, ale w praktyce robi dużą różnicę, zwłaszcza w układach szybkich i podatnych na zakłócenia. Skoro znamy już typowe pułapki, zostaje ostatni, bardzo praktyczny krok: co sprawdzić przed wdrożeniem w realnym sterowniku.
Co sprawdzić przed wdrożeniem w układzie cyfrowym
Jeśli mam doradzić jedną rzecz przed uruchomieniem algorytmu w mikrokontrolerze, to będzie nią lista kontrolna, nie „cudowny” zestaw nastaw. W sterowaniu cyfrowym szczegóły techniczne często są ważniejsze niż sam wzór: rozdzielczość przetwornika, szum, czas próbkowania, ograniczenia wyjścia i sposób awaryjnego przejścia w tryb bezpieczny.
- Sprawdź, czy czujnik ma wystarczającą rozdzielczość i stabilność, żeby PID nie reagował na przypadkowy szum.
- Ustal ograniczenia wyjścia sterującego, bo bez nich bardzo łatwo o nasycenie i windup.
- Zweryfikuj, czy czas próbkowania jest spójny z dynamiką obiektu i nie spowalnia reakcji bardziej niż sam proces.
- Zadbaj o filtrację pomiaru, ale nie przesadzaj z nią, bo zbyt mocne filtrowanie wprowadza dodatkowe opóźnienie.
- Przygotuj tryb awaryjny, który bezpiecznie odcina lub ogranicza sterowanie, gdy czujnik przestanie podawać wiarygodne dane.
W dobrze zaprojektowanym układzie PID nie jest sztuką samą w sobie, tylko narzędziem do utrzymania stabilności tam, gdzie energia, temperatura albo ruch zmieniają się szybciej niż człowiek zdążyłby zareagować ręcznie. Jeśli podejdziesz do niego jak do pętli, a nie jak do magicznego ustawienia, zyskasz rozwiązanie przewidywalne, odporne na zakłócenia i naprawdę użyteczne w elektronice.